Background Link to heading
Elliptic PDEs are the most expensive type of PDE to solve as they require a global solve Unfortunately, they commonly appear in many simulations. This post will cover solution some iterative solution methods for elliptic PDEs. Those are, in order:
- Jacobi Iteration
- Gauss Seidel
- Successive Over-Relaxation (SOR)
- Red-Black Parallelization
The Fortran programming language will be used instead of C or C++ due to its native support for multi-dimensional arrays.
The codes will be compiled with gfortran.
The results will be written out to CSV files and visualized using Matplotlib in Python.
Test Problem Link to heading
The test problem will be one of the simplest examples of an elliptic PDE, Poisson’s Equation: $$ \nabla^2 \phi = f $$
In two dimensions, this is: $$ \frac{\partial^2 \phi}{\partial x^2} + \frac{\partial^2 \phi}{\partial y^2} = f $$
And, it is discretized as: $$ \frac{\phi_{i+1,j} - 2 \phi_{i, j} + \phi_{i-1, j}}{\Delta x^2} + \frac{\phi_{i,j+1} - 2 \phi_{i, j} + \phi_{i,j-1}}{\Delta x^2} = f_{i,j} $$
Direchlet boundary conditions will be used everywhere, as they are the simplest to implement. We will just set all points on the boundary to be zero. The grid will be uniform in both directions so that $h=\Delta x=\Delta y$. The source function on the right hand side is: $$ f = 2\pi^2\sin(\pi x)\sin(\pi y) $$
The analyical solution to this equation is: $$ \phi(x,y) = \sin(\pi x) \sin(\pi y) $$
In the following, the linear system $Ax=b$ is solved, where $A$ the coefficient matrix and $a_{ij}$ are the entries of $A$. The vector $x$ is the solution to the system, and $b$ is the right hand side.
Note that for the test problem considered here, each point depends only on its immediate neighbors. For simplicity, $\phi$ and $f$ will be stored as an $n\times n$ matrices. In Fortran, this can be declared as:
real, dimension(51, 51) :: phi
real, dimension(51, 51) :: f
Iterative Methods Link to heading
Unlike direct methods for solving linear systems, iterative methods start with an initial guess and calculate a corrected value (or, a value that is hopefully more correct). This process repeats until the corrected values are sufficiently similar between iterates. Depending on properties of the linear system being solved, iterative methods are not always guaranteed to converge.
Taking the previously described discretization of the Poisson equation, the value calculated at each iteration for each grid point is: $$ \phi_{i,j} = \frac{\phi_{i+1,j}+\phi_{i-1,j}+\phi_{i,j+1}+\phi_{i,j-1}}{4} $$
Jacobi Method Link to heading
The Jacobi method updates all points at once based on their previous values.
$$
x_i^{(k+1)} = \frac{1}{a_{ii}} \left( b_i - \sum_{j\neq 1} a_{ij} x_j^{(k)} \right)
$$
The implementation as shown below.
The values of the current iterate are stored in phi, and the values of the previous iterate are stored in phi_old.
Convergence is determined when the average absolute change per grid point drops below a specified threshold.
subroutine jacobi_solver(phi, f, h, history, tol)
real(real64), dimension(:, :), intent(inout) :: phi
real(real64), dimension(:, :), intent(in) :: f
real(real64), intent(in) :: h
real(real64), dimension(:), intent(inout) :: history
real(real64), intent(in) :: tol
real(real64), dimension(size(phi, 1), size(phi, 2)) :: phi_old
real(real64) :: update
integer :: i, j, itr, max_itr
integer :: nx, ny
max_itr = size(history)
nx = size(phi, 1)
ny = size(phi, 2)
do itr = 1, max_itr
phi_old = phi
update = 0
do j = 2, ny-1
do i = 2, nx-1
phi(i, j) = (phi_old(i+1, j) + phi_old(i-1, j) + phi_old(i, j+1) + phi_old(i, j-1) - f(i, j) * h**2) / 4
update = update + abs(phi(i, j) - phi_old(i, j))
end do
end do
update = update / (nx * ny)
history(itr) = update
if (update <= tol) then
print *, "Jacobi solver converged at iteration", itr
return
end if
end do
end subroutine
Gauss Seidel Link to heading
The Gauss Seidel method improves on the convergence rate of the Jacobi method by using the updated values as soon as they are available.
$$
x_i^{(k+1)} = \frac{1}{a_{ii}} \left( b_i - \sum_{j=1}^{i-1} a_{ij} x_j^{(k+1)} - \sum_{j=i+1}^{n} a_{ij} x_j^{(k)} \right)
$$
In the implementation below, notice that there is no longer a phi_old variable.
subroutine gauss_seidel(phi, f, h, history, tol)
real(real64), dimension(:, :), intent(inout) :: phi
real(real64), dimension(:, :), intent(in) :: f
real(real64), intent(in) :: h
real(real64), dimension(:), intent(inout) :: history
real(real64), intent(in) :: tol
real(real64) :: update
real(real64) :: oldvalue
integer :: i, j, itr, max_itr
integer :: nx, ny
max_itr = size(history)
nx = size(phi, 1)
ny = size(phi, 2)
do itr = 1, max_itr
update = 0
do j = 2, ny-1
do i = 2, nx-1
oldvalue = phi(i, j)
phi(i, j) = (phi(i+1, j) + phi(i-1, j) + phi(i, j+1) + phi(i, j-1) - f(i, j) * h**2) / 4
update = update + abs(phi(i, j) - oldvalue)
end do
end do
update = update / (nx * ny)
history(itr) = update
if (update <= tol) then
print *, "Gauss-Seidel solver converged at iteration", itr
return
end if
end do
end subroutine
Successive Over-Relaxation (SOR) Link to heading
The method of Successive Over-Relaxation aims to further improve the convergence rate of the Gauss Seidel method by “overstepping” when calculating the next value.
$$
x_i^{(k+1)} = (1-r)x_i^{(k)} + \frac{r}{a_{ii}} \left( b_i - \sum_{j=1}^{i-1} a_{ij} x_j^{(k+1)} - \sum_{j=i+1}^{n} a_{ij} x_j^{(k)} \right)
$$
The implementation is identical to that of Gauss-Seidel, with one exception: the appearance of r.
This variable is what allows SOR to “overstep” or “overcorrect” on each iteration.
When $r\in(1,2)$, SOR will converge faster than Gauss-Seidel.
When $r\in(0,1)$, SOR will converge slower than Gauss-Seidel (since this is technically under-relaxed).
subroutine sor(phi, f, h, history, tol, r)
real(real64), dimension(:, :), intent(inout) :: phi
real(real64), dimension(:, :), intent(in) :: f
real(real64), intent(in) :: h
real(real64), dimension(:), intent(inout) :: history
real(real64), intent(in) :: tol
real(real64), intent(in) :: r
real(real64) :: update
real(real64) :: oldvalue, newvalue
integer :: i, j, itr, max_itr
integer :: nx, ny
max_itr = size(history)
nx = size(phi, 1)
ny = size(phi, 2)
do itr = 1, max_itr
update = 0
do j = 2, ny-1
do i = 2, nx-1
oldvalue = phi(i, j)
newvalue = (phi(i+1, j) + phi(i-1, j) + phi(i, j+1) + phi(i, j-1) - f(i, j) * h**2) / 4
phi(i, j) = (1 - r) * phi(i, j) + r * newvalue
update = update + abs(phi(i,j) - oldvalue)
end do
end do
update = update / (nx * ny)
history(itr) = update
if (update <= tol) then
print *, "S.O.R. solver converged at iteration", itr
return
end if
end do
end subroutine
Comparisons Link to heading
The table below summarizes the performance of each method.
The tolerance for convergence was set to $1\times 10^{-7}$, and the walltime was obtained by prepending time -p to the call.
Where applicable, the over-relaxation factor was set to $1\times 10^{-7}$.
The error norm is determined via comparison to the analytical solution.
| Method | Iterations | Walltime | Error Norm @ Convergence |
|---|---|---|---|
| Jacobi | 50292 | 1.67s | 0.200 |
| Gauss-Seidel | 27956 | 3.97s | 0.099 |
| Successive Over-Relaxation | 6167 | 1.17s | 0.016 |
When moving from Jacobi to Gauss-Seidel, the total number of iterations required to converge drops significantly, but the total wall time actually increases. This is due to caching behavior. The Jacobi method writes all the values at once. These values are then copied to store old values for the next iteration. The Gauss-Seidel method updates a value and immediately uses that updated value at the next grid point. While this reduces the number of iterates required to converge, the algorithm forces the CPU to wait until the value is written to memory before reading it again. It is this “roundtrip” that causes Gauss-Seidel to have increased walltime. This highlights why memory access patterns are important to keep in mind. Here, we can reclaim the walltime with over-relaxation.
The other thing worth noting is the error norm at convergence. The iteration matrix for the Jacobi method is known to damp high-frequency errors quickly, but low-frequency errors tend to linger. This manifests as increased error at convergence. It can be resolved via multi-grid methods, which are beyond the scope of this post.
From these results, the benefit of the method of Successive Over-Relaxation is apparent. However, all of these methods run on a single CPU core. We can further speedup the solution by using multiple CPU cores.
Parallelization Link to heading
The Red-Black scheme is more like a cross between Successive Over-Relaxation and Jacobi Method. The key idea is to parallelize the update of all grid points that do not depend on each other. This is easily visualized by imagining a checkerboard - the values at all the red points can be updated from the values at the black points, and the values at all the black points can be updated from the values at the red points. These two groups of points do not interfere with each other, and so their updates can be parallelized without causing a race condition or corrupting memory.
The implementation is similar to that of the method of Successive Over-Relxation, with the exception of the addition of a color loop, which is run twice.
The value of color is used to determine if the red or black points are being updated.
The ioffset variable, which is either 0 or 1, tells the i loop (which skips every other grid point) where to start.
The j loop is then parallelized with an OpenMP directive.
PARALLELdenotes a parallel regionDOlets the compiler know that the following Fortran DO loop can be parallelized with OpenMPPRIVATEis used to specify the variables that each OpenMP thread will receive a private copy of.REDUCTIONlets the compiler know that each thread will have its own copy oflocal_update. When exiting the loop, all the copies oflocal_updatewill be reduced via the specified operation (here, addition) into a single copy of the variable. We do this twice so that the total update is calculated as the sum of the local updates from the red and black loops.
subroutine rb(phi, f, h, history, tol, r)
real(real64), dimension(:, :), intent(inout) :: phi
real(real64), dimension(:, :), intent(in) :: f
real(real64), intent(in) :: h
real(real64), dimension(:), intent(inout) :: history
real(real64), intent(in) :: tol
real(real64), intent(in) :: r
real(real64) :: oldvalue
real(real64) :: newvalue
real(real64) :: update
real(real64) :: local_update
integer :: i, j, itr, max_itr
integer :: nx, ny
integer :: color
integer :: ioffset
print *, "Running with", omp_get_max_threads(), "threads"
max_itr = size(history)
nx = size(phi, 1)
ny = size(phi, 2)
do itr = 1, max_itr
update = 0
do color = 1,2
local_update = 0 ! using an OpenMP reduction is faster than a critical block within parallel region
!$OMP PARALLEL DO PRIVATE(i, ioffset, oldvalue, newvalue) REDUCTION(+:local_update)
do j = 2, ny-1
ioffset = mod(j+color, 2)
do i = 2 + ioffset, nx-1, 2
oldvalue = phi(i, j)
newvalue = (phi(i+1, j) + phi(i-1, j) + phi(i, j+1) + phi(i, j-1) - f(i, j) * h**2) / 4
phi(i, j) = (1 - r) * phi(i, j) + r * newvalue
local_update = local_update + abs(phi(i, j) - oldvalue)
end do
end do
!$OMP END PARALLEL DO
update = update + local_update
end do
update = update / (nx * ny)
history(itr) = update
if (update <= tol) then
print *, "Red-Black solver converged at iteration", itr
return
end if
end do
end subroutine
Recall the caching / roundtrip memory access discussed previously. Red-black memory access patterns are great for parallelization, but they also do not have any roundtrip memory accesses. This means that a red-black method may show a faster runtime even on one thread (without parallelization), simply due to the improved memory access pattern.
By default, OpenMP will farm the work out to all available hardware threads on the system, including hyperthreading / symmetric multi-threading (depending on if your processor is Intel or AMD). This can be controled with environment variables, such as OMP_NUM_PLACES and OMP_PLACES, which are used to control the number of OMP workers and where those workers are bound to. For example:
$> env OMP_PLACES='threads' OMP_NUM_PLACES=4 ./executable_program
The table below shows all results with the OpenMP results included. The Red-Black OpenMP version is run with both 12 threads and on a single thread. The over-relaxation factor was also set to $1\times 10^{-7}$. Notice that both thread counts result in significantly faster performance. From this, it can be inferred that the memory access pattern contributes significantly to improving the runtime.
| Method | Iterations | Walltime | Error Norm @ Convergence |
|---|---|---|---|
| Jacobi | 50292 | 1.67s | 0.200 |
| Gauss-Seidel | 27956 | 3.97s | 0.099 |
| Successive Over-Relaxation | 6167 | 1.17s | 0.016 |
| Red-Black Over-Relaxation (12 threads) | 6166 | 0.18s | 0.016 |
| Red-Black Over-Relaxation (1 thread) | 6166 | 0.31s | 0.016 |
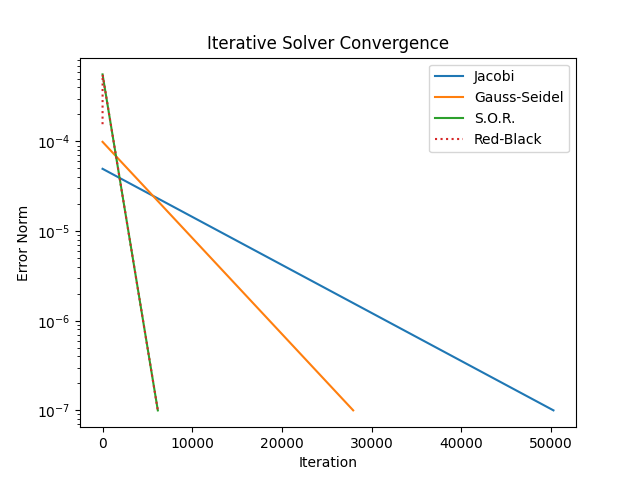
The following plot provides an alternate way of visualizing the number of iterations required to converge.
Summary Link to heading
This post covered the basics of iterative methods for solving PDEs. The convergence rate and walltime of different methods was explored, and used to motivate the introduction of red-black schemes for parallelization with OpenMP. Future posts will use this in examples of actual CFD codes rather than on toy problems, and potentially explore multigrid methods as well.