This robot was built in the spring of 2018, when I took part in a robotics competition as part of the Pennsylvania branch of the Technology Student Association (TSA).
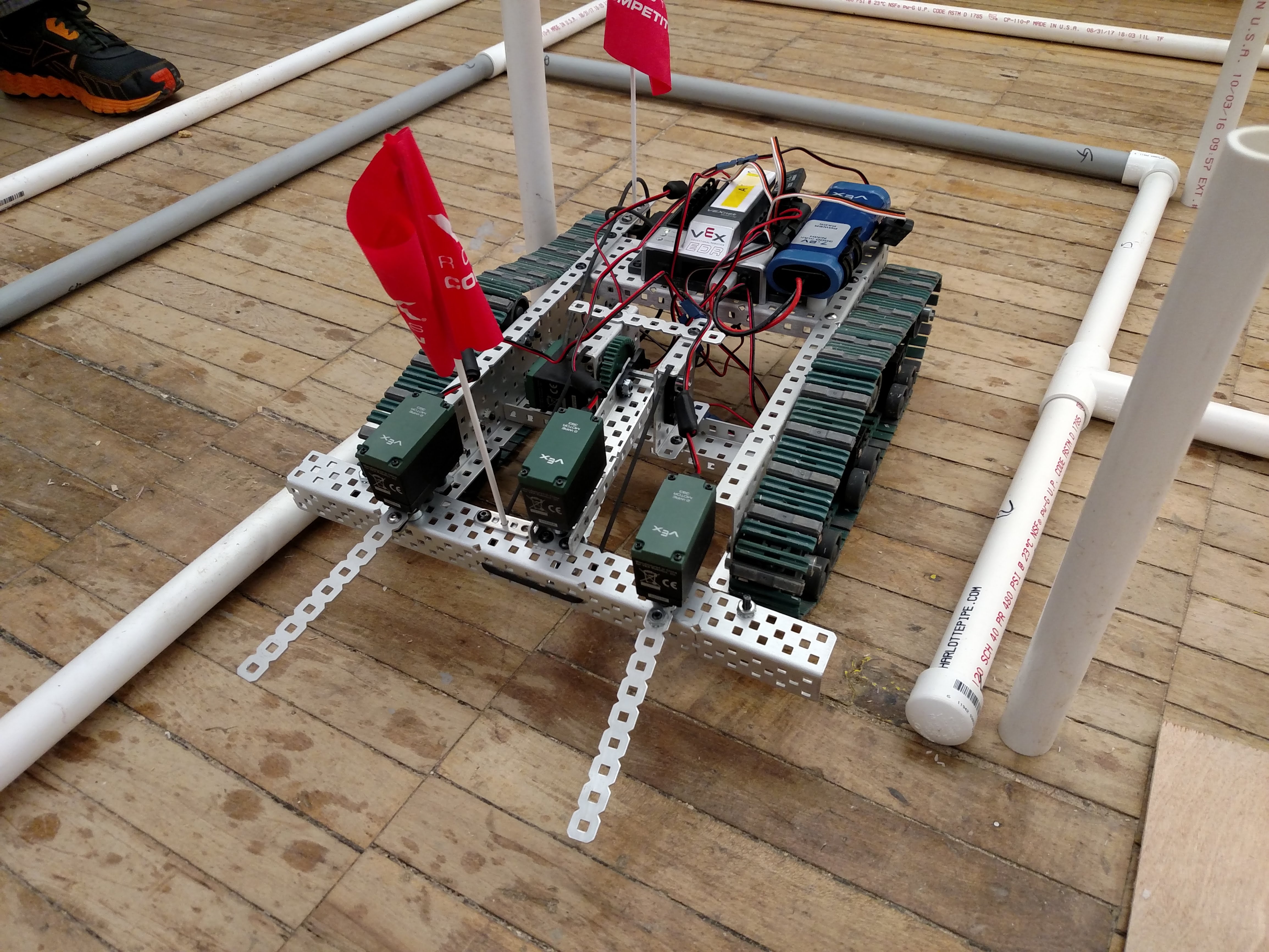
The premise of the competition is to build a robot for navigating hazardous terrain and clearing obstacles in a search and rescue situation.
The tasks included in the course are to demonstrate manuverability by navigating tight spaces, traversing obstacles in the form of beanbags and other objects stacked up to 6 inches high, clear and push small objects out of the way, and interact with a button to shut off a gas leak.
The time limit for the course was 3 minutes, with penalties added for every task failed and everytime the course was disturbed.
My team won first place, with a time of 1:07 and all tasks completed, no penalties.
The inspiration for this robot was existing bomb disposal robots and the all terrain skid steers used on construction sites.
These machines are often as simple as possible, emphasizing robustness and durability over elegance and aesthetically appealing designs.
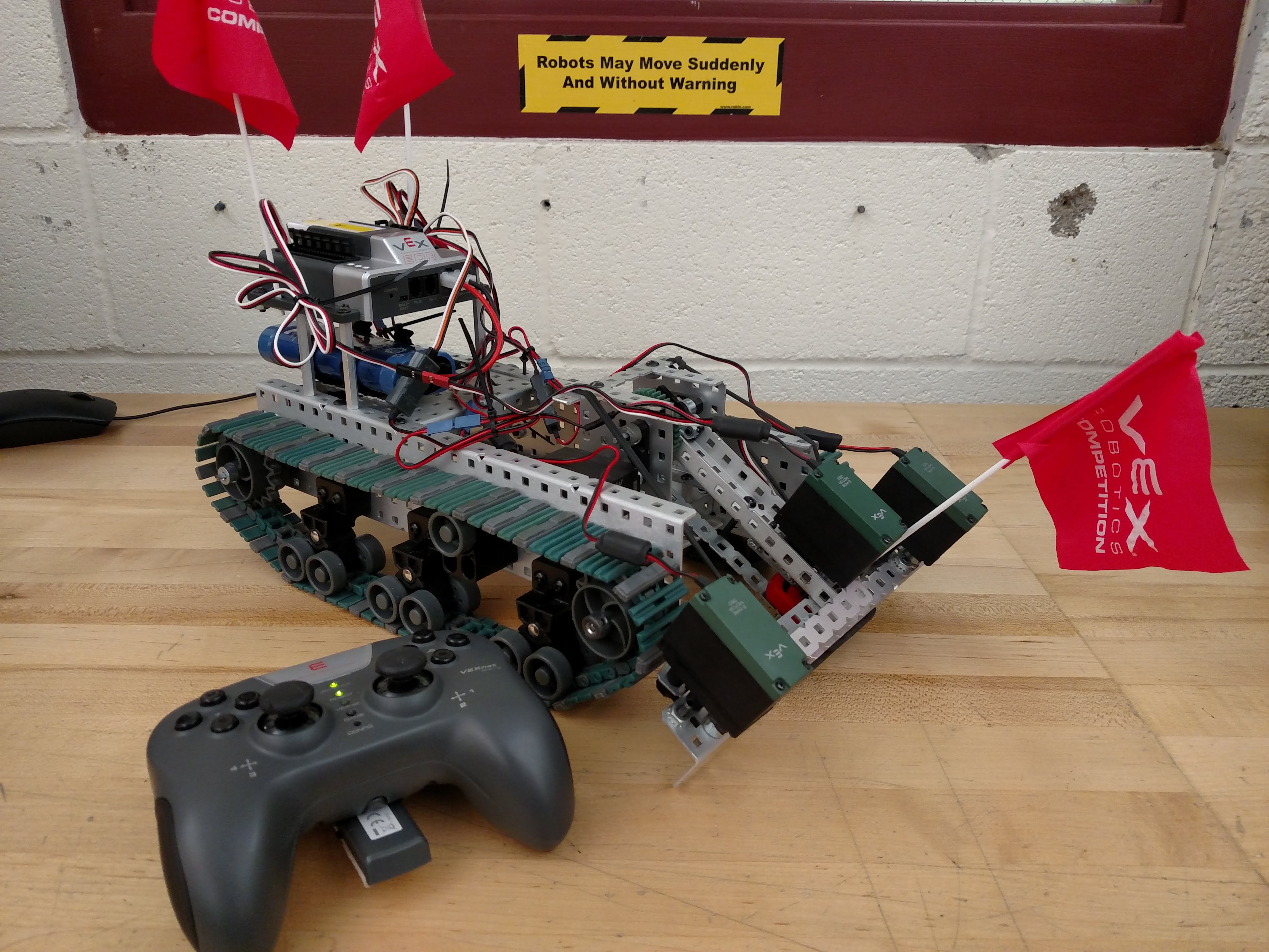
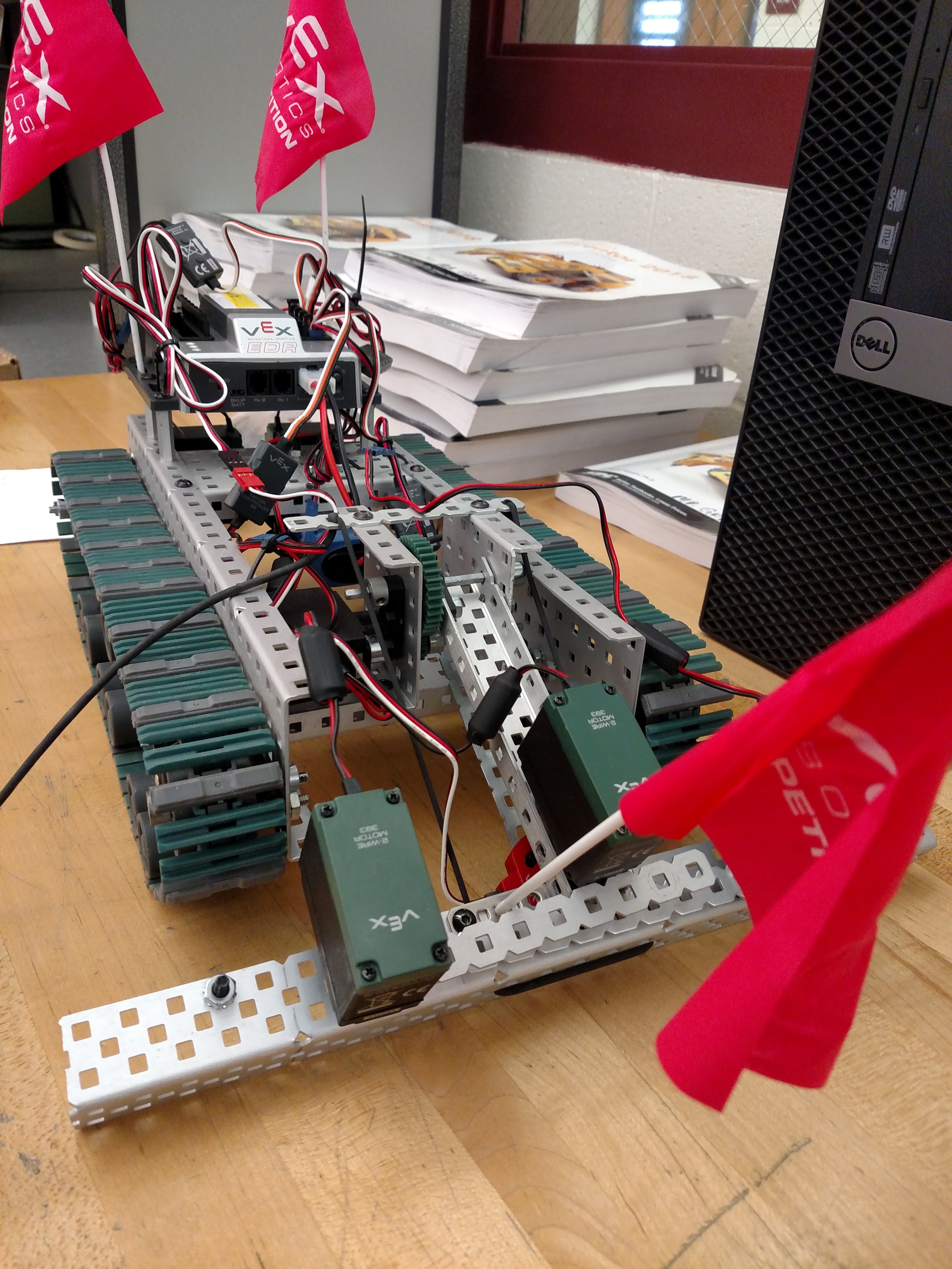
This can be seen in the robot's construction, with treads and a multipurpose manipulator arm on the front.
The arm's primary attachment is a plow, used to move objects out of the way. The plow has a total of three "fingers" attached to its sides and middle, which extend to allow for more precise interactions with its enviroment.
Pictures and a testing video are provided below. Notice the servo motors attached to the plow, which operate the manipulators.